AABB-Plane-intersection 的算法原理和 Unity 实现
写这篇博文的起因是我在学习 runtime 的 mesh 切割算法时需要判断目标 mesh 是否和切面相交(不相交的话我就不需要去处理了)
前提知识
Unity 的 mesh 和 collider 都使用 AABB 包围盒
什么是 AABB 包围盒?
AABB ==> Axis Aligned Bounding Box (轴对齐边界框)
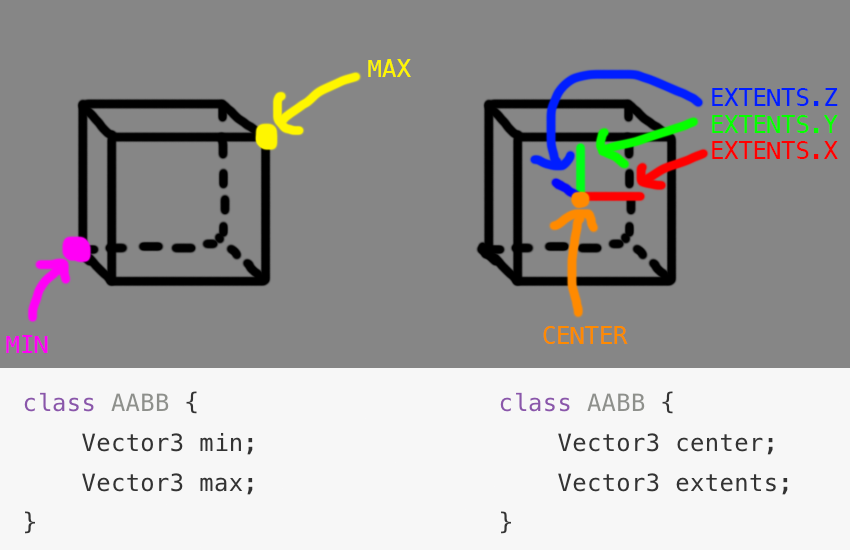
AABB(轴对齐边界框)是一个 3D 框。它的宽度/高度/深度不必相等,但宽度始终与 X 轴对齐,高度与 Y 轴对齐,深度与 Z 轴对齐。也就是说,这个盒子是不能旋转的。
如何表示 AABB?
有两种常见的方法,存储最左边和最右边的角,或者存储中心点和盒子在每侧延伸多远的向量。
第一种:
第二种:
算法
为了测试 AABB 和平面是否相交,我们首先必须将 AABB 的每个顶点投影到平面的法线上。这使我们 AABB 的所有顶点都在一条线上。
然后,我们检查离平面最远的顶点。如果与顶点对角线相对的顶点位于平面的另一侧,则我们有一个交点。
通用的 C# 代码如下,无论你的 AABB 是如何表示的(max/min 或 center/extents),只需要稍作修改:
// Test if AABB b intersects plane p
int TestAABBPlane(AABB b, Plane p) {
// Convert AABB to center-extents representation
Point c = (b.max + b.min) * 0.5f; // Compute AABB center
Point e = b.max - c; // Compute positive extents
// Compute the projection interval radius of b onto L(t) = b.c + t * p.n
float r = e[0]*Abs(p.n[0]) + e[1]*Abs(p.n[1]) + e[2]*Abs(p.n[2]);
// Compute distance of box center from plane
float s = Dot(p.n, c) - p.d;
// Intersection occurs when distance s falls within [-r,+r] interval
return Abs(s) <= r;
}
让我们来解析这段代码
- 函数传入了目标 Mesh 的 AABB,和目标平面
- 进入后的两行假设你的 AABB 是用 max/min 表示的,如果你可以轻松调取 AABB 的 center 和 extents,那么这两行是可以被跳过的
- 下一段代码计算了 AABB 的投影半径,这个半径是 AABB 投影到平面法线上的最大距离。
- 其取 AABB 的范围和平面法线的绝对值的点积,用于确保计算出的长度是正值,因为两个向量中的元素都是正值或零。 $$ n' = (\lvert n_{x} \rvert,\lvert n_{y} \rvert,\lvert n_{z} \rvert) \ \vec{e} \cdot \vec{n'} = \lvert\vec{e} \rvert \lvert\vec{n'} \rvert \cos \theta \ \lvert\vec{n'} \rvert =1 \\vec{e} \cdot \vec{n'} = \lvert\vec{e} \rvert \cos \theta $$
- 下面计算了 AABB 中心点到平面的距离,计为 s
- 最后的返回值即为 AABB 自身在平面法线上的距离和其中心到平面距离长短的判断
Unity 实现
public static bool BoundPlaneIntersect(Mesh mesh, ref Plane plane)
{
// Compute projection interval radius
float r = mesh.bounds.extents.x * Mathf.Abs(plane.normal.x) +
mesh.bounds.extents.y * Mathf.Abs(plane.normal.y) +
mesh.bounds.extents.z * Mathf.Abs(plane.normal.z);//做点乘,得出mesh包围盒的范围在平面法线上的投影,包围盒在平面法线方向上的最大距离
// Compute distance of box center from plane
float s = Vector3.Dot(plane.normal, mesh.bounds.center) - (-plane.distance);//前面点乘得mesh中心在平面法线上的投影,这是为了确保计算出的距离和后面的平面距离在同一方向
//如果法线面朝内,后- (-plane.distance)为正,前mesh中心在与相对原点相交且与平面平行的平面‘靠近平面的一侧,Vector3.Dot(plane.normal, mesh.bounds.center)为负,符合逻辑
//因为mesh中心和平面在同一侧,距离为相见
//若mesh中心在与 相对原点相交且与平面平行的平面‘ 远离平面的一侧,就是说mesh中心与平面中间相隔了一个原点,那么前后就都是同号,符合逻辑
// Intersection occurs when distance s falls within [-r,+r] interval
return Mathf.Abs(s) <= r;
}